乘風破浪文件說明
影像介紹:
本實驗使用kaggle對於船辨識的衛星影像資料庫,其影像資料庫是使用PLANETSCOPE光學影像,空間解析度3公尺。拍攝地點位於San Francisco海灣,總共裁切成4000張 80X80 RGB的json檔。標籤有0和1,分別代表有船和無船,有船在影像中有1000張,影像中無船有3000張,以此構成這實驗的訓練和預測樣本。
Jason檔案包含影像和標籤,可從以下google drive下載:
https://drive.google.com/file/d/1vf1l99MG4PQQ1V4QaNEfOAD-CebiIcxA/view?usp=sharing
實驗方法介紹:
使用支持向量機來訓練與預測影像樣本,其中影像特徵擷取採用了HOG、Canny、GLCM和LBP方法,並分別求得各種特徵的準確率。
以下是原始影像:

轉成灰階影像:

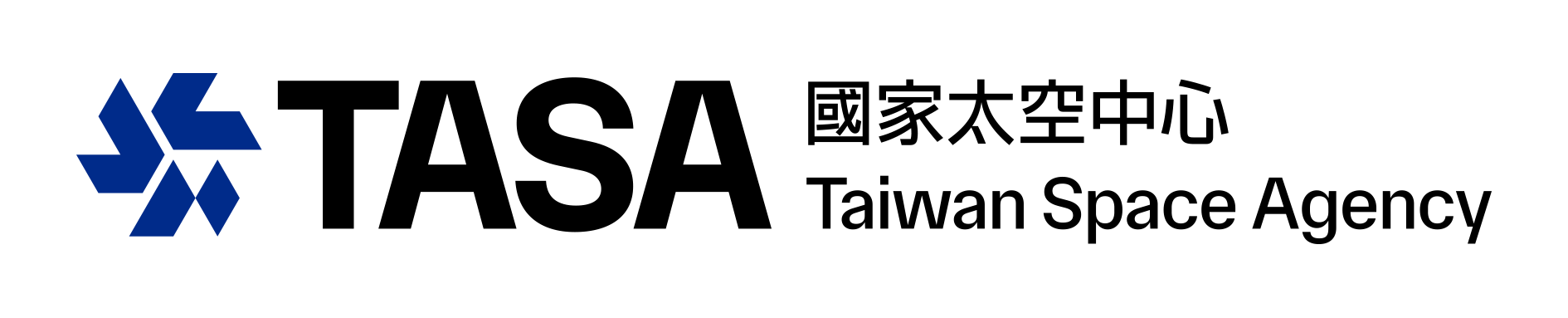
取HOG特徵的影像:
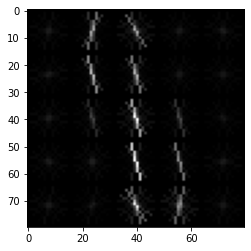
取Canny特徵的影像:
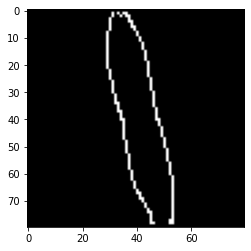
取LBP特徵的影像:
實驗結果:
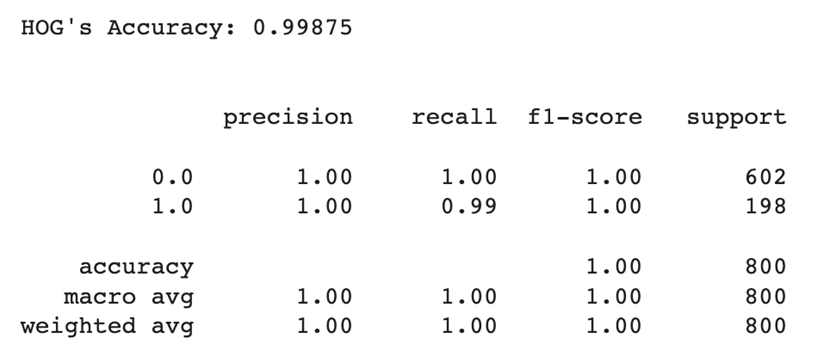
HOG 準確率:0.99875
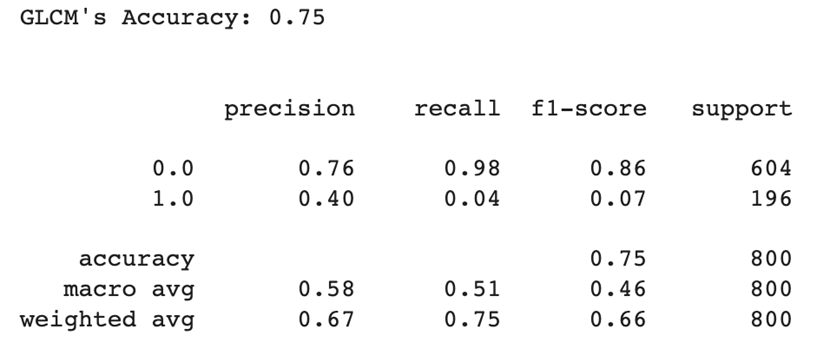
GLCM 準確率:0.75
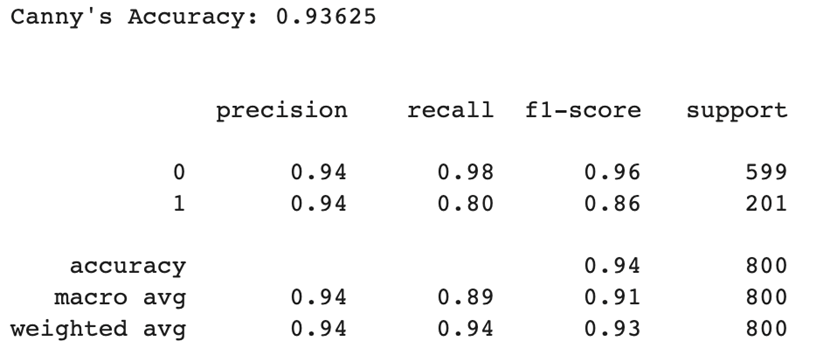
Canny 準確率:0.93625
LBP 準確率:0.85125
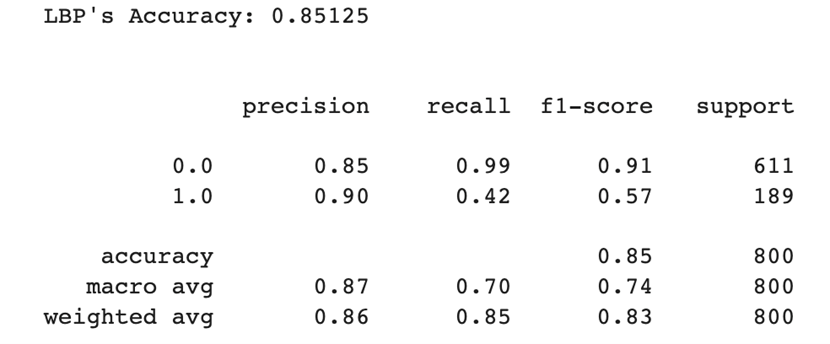
四種取特徵方式的準確率比較:
|
|
HOG |
GLCM |
Canny |
LBP |
|
準確率 |
0.99875 |
0.75 |
0.93625 |
0.85125 |
實驗結論:
本次對於船的辨識實驗結果,使用HOG求取特徵有著最佳的辨識結果,但用外型特徵的Canny也是種不錯的方式,且輪廓形狀比較類似,未來還可嘗試不同的影像類型和提取特徵方式,亦或者使用深度學習框架做訓練,此次實驗第一次使用這平台,感覺挺有趣,但如果能增加存放檔案的時間,會更方便。
注意:因為貴網站提供jupyter notebook預設的虛擬記憶體不足,所以沒辦法跑程式碼,但只需要經以下調整,就可以執行檔案。
1)使用命令生成配置檔案:
jupyter notebook --generate-config
2)開啟位於“jupyter”資料夾內的 jupyter_notebook_config.py 檔案並編輯以下屬性:
NotebookApp.max_buffer_size = your desired value
請記住刪除屬性值之前的“#”。
3)儲存並執行 jupyter notebook。它現在應該利用設定的記憶體值。另外,不要忘記從 jupyter 資料夾中執行 notebook。
參考以下網站修改:
https://python.quickpon.top/questions/python/how-to-increase-jupyter-notebook-memory-limit/